









Many students of the Texas A&M Vehicle Systems & Control Laboratory have been selected for offsite internships for the Summer of 2022. These internships show VSCL student representation at a variety of companies and institutions across the United States. Students which have been selected for internships in the Summer of 2022 include:

VSCL Graduate Research Assistant Connor Atkins has been selected for a Summer 2022 internship with Los Alamos National Laboratory in Los Alamos, NM. Connor will be working as a Graduate Student Intern and assisting with documentation/procedure and testing of new systems within the physics lab. Connor has been a member of VSCL since 2018 and has worked on numerous projects. Currently, he is working with the flight testing group at the RELLIS Campus. Having experience with both the software and hardware sides of the vehicles, he performs preflight maintenance and aids in the testing of a variety of UAS that VSCL handles.
 VSCL Undergraduate Research Assistant Alex Gross has been selected for a Summer 2022 internship at Sandia National Laboratory in Albuquerque, NM. Alex will be working as a Research & Development Intern focusing on applying machine learning to hypersonic applications. Alex is a Junior and has been a member of VSCL since 2020. He has focused his research on UAS autonomous guidance and landing, embedded systems, and user-interface integration.
VSCL Undergraduate Research Assistant Alex Gross has been selected for a Summer 2022 internship at Sandia National Laboratory in Albuquerque, NM. Alex will be working as a Research & Development Intern focusing on applying machine learning to hypersonic applications. Alex is a Junior and has been a member of VSCL since 2020. He has focused his research on UAS autonomous guidance and landing, embedded systems, and user-interface integration.
 VSCL Graduate Research Assistant and Ph.D Student Hannah Lehman has been selected for a Summer 2022 research internship at Sandia National Laboratory in Albuquerque, NM. Hannah has been working as a Year-Round Research & Development Intern since 2020, with a principal focus of applying machine learning to defense vehicles. Hannah started working with VSCL as an undergraduate in the Spring of 2017, with her major roles including managing the flight simulator lab and performing research into reinforcement learning for use onboard aircraft. Hannah graduated with her B.S. in Aerospace Engineering in May 2020 and and continued with VSCL to pursue her Ph.D.
VSCL Graduate Research Assistant and Ph.D Student Hannah Lehman has been selected for a Summer 2022 research internship at Sandia National Laboratory in Albuquerque, NM. Hannah has been working as a Year-Round Research & Development Intern since 2020, with a principal focus of applying machine learning to defense vehicles. Hannah started working with VSCL as an undergraduate in the Spring of 2017, with her major roles including managing the flight simulator lab and performing research into reinforcement learning for use onboard aircraft. Hannah graduated with her B.S. in Aerospace Engineering in May 2020 and and continued with VSCL to pursue her Ph.D.
 VSCL Graduate Research Assistant and M.S. Student Cassie-Kay McQuinn has been selected for a Summer 2022 research internship at Sandia National Laboratory in Albuquerque, NM. Cassie will be a Research and Development Intern with a focus of applying autonomy solutions to advance the national security mission. Cassie has been a member of VSCL since Spring 2021 and joined as a M.S. student in the Spring 2022 semester. Cassie-Kay’s main interests include flight test engineering, aircraft dynamics, and system identification.
VSCL Graduate Research Assistant and M.S. Student Cassie-Kay McQuinn has been selected for a Summer 2022 research internship at Sandia National Laboratory in Albuquerque, NM. Cassie will be a Research and Development Intern with a focus of applying autonomy solutions to advance the national security mission. Cassie has been a member of VSCL since Spring 2021 and joined as a M.S. student in the Spring 2022 semester. Cassie-Kay’s main interests include flight test engineering, aircraft dynamics, and system identification.
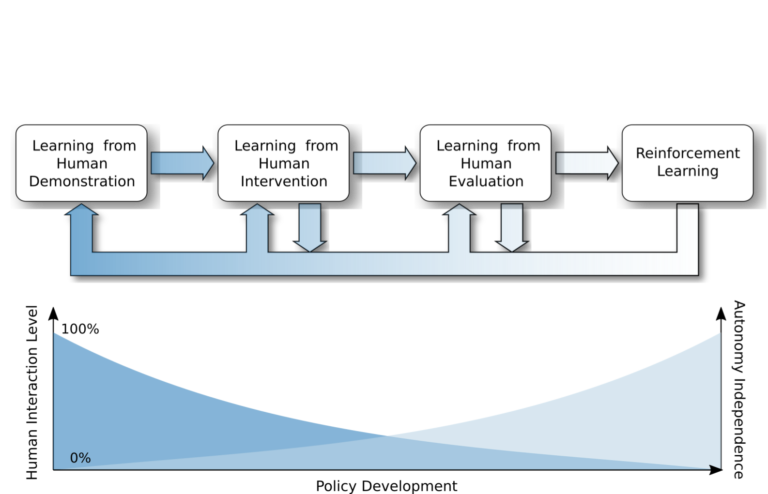
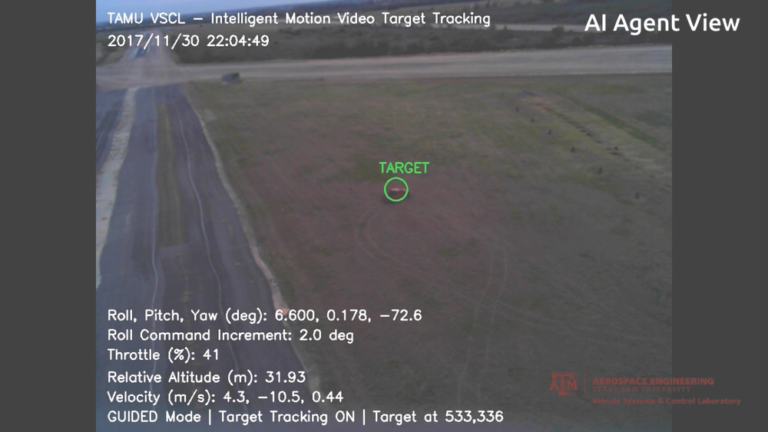
 VSCL Graduate Research Assistant Md Nazmus Sunbeam has been selected for a Summer 2022 internship with the Army Research Laboratory in Aberdeen, MD. Sunbeam will be working as a Summer Student Researcher with the Human Research and Engineering Directorate developing algorithms and extensions for Cycle-of-Learning. Cycle-of-Learning is a framework for quick training of AI agents through human interaction. Sunbeam has been a member of VSCL: since August 2021. His research has focused on advancing the Cycle-of-Learning by investigating the use of similarity metrics.
VSCL Graduate Research Assistant Md Nazmus Sunbeam has been selected for a Summer 2022 internship with the Army Research Laboratory in Aberdeen, MD. Sunbeam will be working as a Summer Student Researcher with the Human Research and Engineering Directorate developing algorithms and extensions for Cycle-of-Learning. Cycle-of-Learning is a framework for quick training of AI agents through human interaction. Sunbeam has been a member of VSCL: since August 2021. His research has focused on advancing the Cycle-of-Learning by investigating the use of similarity metrics.

VSCL Undergraduate Research Assistant Carla Zaramella has been selected for a Summer 2022 internship at Raytheon Technologies in Tewksbury MA. Carla will be working as a Whole Life Program – Systems Engineering Intern in RTX Missiles and Defense with a team to ensure that hardware and systems are effective, reliable and maintainable. Carla is a Sophomore and has been a member of VSCL since January of 2022 and has been involved in flight testing and supporting research for system identification.

 Dr. John Valasek, Professor in the Department of Aerospace Engineering at Texas A&M University and Director of the Vehicle Systems & Control Laboratory, and VSCL student Garrett Jares gave a virtual seminar titled “Control Acquisition Attack of Aerospace Systems via False Data Injection of Sensor Data” for Sandia National Laboratories. The seminar was presented as part of a monthly seminar series for the Science and Technology Advancing Resilience for Contested Space (STARCS) Mission Campaign. The date of the seminar was 28 February 2022.
Dr. John Valasek, Professor in the Department of Aerospace Engineering at Texas A&M University and Director of the Vehicle Systems & Control Laboratory, and VSCL student Garrett Jares gave a virtual seminar titled “Control Acquisition Attack of Aerospace Systems via False Data Injection of Sensor Data” for Sandia National Laboratories. The seminar was presented as part of a monthly seminar series for the Science and Technology Advancing Resilience for Contested Space (STARCS) Mission Campaign. The date of the seminar was 28 February 2022. VSCL Graduate Student Maison Clouatre has been awarded the
VSCL Graduate Student Maison Clouatre has been awarded the  VSCL student Blake Krpec, who will graduate with his Master of Science degree in May 2022, has defended his thesis “Vision-Based Marker-Less Landing of a UAS On a Moving Ground Vehicle”. Blake’s defense had 34 people in attendance including many in attendance from the Army Research Lab. His committee is Drs. Reza Langari, Manoranjan Majji, Srikanth Saripalli, and Stephen Nogar (special committee member from Army Research Laboratory and the Technical Monitor). His research is supported as a Journeyman Fellow by the
VSCL student Blake Krpec, who will graduate with his Master of Science degree in May 2022, has defended his thesis “Vision-Based Marker-Less Landing of a UAS On a Moving Ground Vehicle”. Blake’s defense had 34 people in attendance including many in attendance from the Army Research Lab. His committee is Drs. Reza Langari, Manoranjan Majji, Srikanth Saripalli, and Stephen Nogar (special committee member from Army Research Laboratory and the Technical Monitor). His research is supported as a Journeyman Fellow by the 
 Dr. Sangwoo Moon, postdoctoral researcher in VSCL, has accepted a position as a Postdoctoral Fellow with NASA’s Jet Propulsion Laboratory. Dr. Moon will be working with the JPL Robotics Group, Robotic Aerial Mobility. His work at JPL will be mainly focused on communication-aware decision making and perception approaches for multi-robot systems. The work will include software development/integration for data fusion and multi-level planning/control, simulation verification/
Dr. Sangwoo Moon, postdoctoral researcher in VSCL, has accepted a position as a Postdoctoral Fellow with NASA’s Jet Propulsion Laboratory. Dr. Moon will be working with the JPL Robotics Group, Robotic Aerial Mobility. His work at JPL will be mainly focused on communication-aware decision making and perception approaches for multi-robot systems. The work will include software development/integration for data fusion and multi-level planning/control, simulation verification/ VSCL student
VSCL student 
 Chris Leshikar ’20 will be presenting the paper “System Identification Flight Testing of Inverted V-Tail small Unmanned Air System”, which addresses challenges in conducting flight testing an inverted V-Tail fixed-winged vehicle and the results obtained from the flight tests. The goal of the flight tests was to obtain longitudinal, lateral/directional and combined longitudinal lateral/directional linear state-space model for the RMRC Anaconda using the Observer\Kalman Identification (OKID) algorithm. Both manual and automated excitation signals were injected into the Anaconda. Parametric sweeps of the excitation signals were performed using the Developmental Flight Test Instrumentation Two (DFTI2) system. The identified longitudinal linear state-space model modelled the longitudinal dynamics well and the identified lateral/directional reasonably well while the identified combined longitudinal lateral/directional model showed decent correlation with the decoupled models.
Chris Leshikar ’20 will be presenting the paper “System Identification Flight Testing of Inverted V-Tail small Unmanned Air System”, which addresses challenges in conducting flight testing an inverted V-Tail fixed-winged vehicle and the results obtained from the flight tests. The goal of the flight tests was to obtain longitudinal, lateral/directional and combined longitudinal lateral/directional linear state-space model for the RMRC Anaconda using the Observer\Kalman Identification (OKID) algorithm. Both manual and automated excitation signals were injected into the Anaconda. Parametric sweeps of the excitation signals were performed using the Developmental Flight Test Instrumentation Two (DFTI2) system. The identified longitudinal linear state-space model modelled the longitudinal dynamics well and the identified lateral/directional reasonably well while the identified combined longitudinal lateral/directional model showed decent correlation with the decoupled models.