









VSCL hosted Dr. Robert Abrose, Professor in the Texas A&M Department of Mechanical Engineering and Director for Space and Robotics at the Bush Combat Development Complex, at the Texas A&M University UAS Flight Testing Facility at RELLIS Campus. Dr. Ambrose met with Lab Director Dr. John Valasek and several VSCL Graduate Students. Dr. Ambrose and VSCL discussed UAS autonomy research and flight testing capabilities to identify points for potential collaboration with the Bush Combat Development Complex.








 VSCL Undergraduate Research Assistant Alex Gross has been selected for a Summer 2022 internship at
VSCL Undergraduate Research Assistant Alex Gross has been selected for a Summer 2022 internship at  VSCL Graduate Research Assistant and Ph.D Student Hannah Lehman has been selected for a Summer 2022 research internship at
VSCL Graduate Research Assistant and Ph.D Student Hannah Lehman has been selected for a Summer 2022 research internship at  VSCL Graduate Research Assistant and M.S. Student Cassie-Kay McQuinn has been selected for a Summer 2022 research internship at
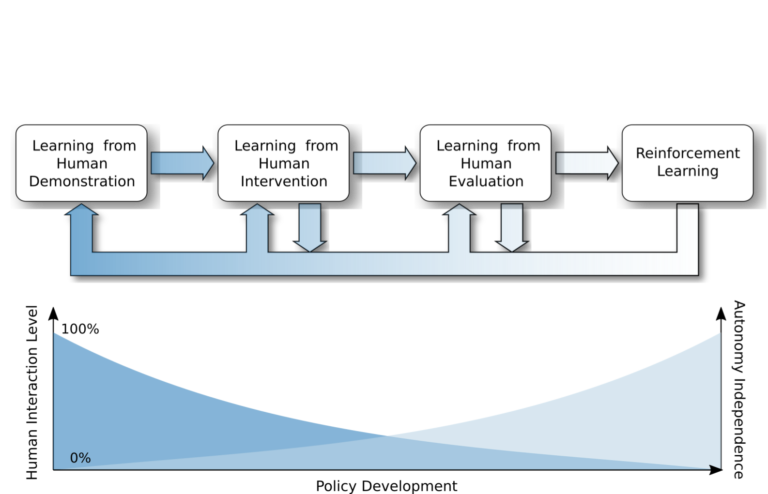
VSCL Graduate Research Assistant and M.S. Student Cassie-Kay McQuinn has been selected for a Summer 2022 research internship at  VSCL Graduate Research Assistant Md Nazmus Sunbeam has been selected for a Summer 2022 internship with the Army Research Laboratory in Aberdeen, MD. Sunbeam will be working as a Summer Student Researcher with the Human Research and Engineering Directorate developing algorithms and extensions for Cycle-of-Learning. Cycle-of-Learning is a framework for quick training of AI agents through human interaction. Sunbeam has been a member of VSCL: since August 2021. His research has focused on advancing the Cycle-of-Learning by investigating the use of similarity metrics.
VSCL Graduate Research Assistant Md Nazmus Sunbeam has been selected for a Summer 2022 internship with the Army Research Laboratory in Aberdeen, MD. Sunbeam will be working as a Summer Student Researcher with the Human Research and Engineering Directorate developing algorithms and extensions for Cycle-of-Learning. Cycle-of-Learning is a framework for quick training of AI agents through human interaction. Sunbeam has been a member of VSCL: since August 2021. His research has focused on advancing the Cycle-of-Learning by investigating the use of similarity metrics.

 Dr. John Valasek, Professor in the Department of Aerospace Engineering at Texas A&M University and Director of the Vehicle Systems & Control Laboratory, and VSCL student Garrett Jares gave a virtual seminar titled “Control Acquisition Attack of Aerospace Systems via False Data Injection of Sensor Data” for Sandia National Laboratories. The seminar was presented as part of a monthly seminar series for the Science and Technology Advancing Resilience for Contested Space (STARCS) Mission Campaign. The date of the seminar was 28 February 2022.
Dr. John Valasek, Professor in the Department of Aerospace Engineering at Texas A&M University and Director of the Vehicle Systems & Control Laboratory, and VSCL student Garrett Jares gave a virtual seminar titled “Control Acquisition Attack of Aerospace Systems via False Data Injection of Sensor Data” for Sandia National Laboratories. The seminar was presented as part of a monthly seminar series for the Science and Technology Advancing Resilience for Contested Space (STARCS) Mission Campaign. The date of the seminar was 28 February 2022. VSCL Graduate Student Maison Clouatre has been awarded the
VSCL Graduate Student Maison Clouatre has been awarded the  VSCL student Blake Krpec, who will graduate with his Master of Science degree in May 2022, has defended his thesis “Vision-Based Marker-Less Landing of a UAS On a Moving Ground Vehicle”. Blake’s defense had 34 people in attendance including many in attendance from the Army Research Lab. His committee is Drs. Reza Langari, Manoranjan Majji, Srikanth Saripalli, and Stephen Nogar (special committee member from Army Research Laboratory and the Technical Monitor). His research is supported as a Journeyman Fellow by the
VSCL student Blake Krpec, who will graduate with his Master of Science degree in May 2022, has defended his thesis “Vision-Based Marker-Less Landing of a UAS On a Moving Ground Vehicle”. Blake’s defense had 34 people in attendance including many in attendance from the Army Research Lab. His committee is Drs. Reza Langari, Manoranjan Majji, Srikanth Saripalli, and Stephen Nogar (special committee member from Army Research Laboratory and the Technical Monitor). His research is supported as a Journeyman Fellow by the 
 Dr. Sangwoo Moon, postdoctoral researcher in VSCL, has accepted a position as a Postdoctoral Fellow with NASA’s Jet Propulsion Laboratory. Dr. Moon will be working with the JPL Robotics Group, Robotic Aerial Mobility. His work at JPL will be mainly focused on communication-aware decision making and perception approaches for multi-robot systems. The work will include software development/integration for data fusion and multi-level planning/control, simulation verification/
Dr. Sangwoo Moon, postdoctoral researcher in VSCL, has accepted a position as a Postdoctoral Fellow with NASA’s Jet Propulsion Laboratory. Dr. Moon will be working with the JPL Robotics Group, Robotic Aerial Mobility. His work at JPL will be mainly focused on communication-aware decision making and perception approaches for multi-robot systems. The work will include software development/integration for data fusion and multi-level planning/control, simulation verification/