









For the Fall of 2025, Jillian Bennett received the Aerospace Engineering Graduate Excellence Fellowship, a competitive fellowship  selected by the AERO Graduate Program Committee with an award of $1,000.
selected by the AERO Graduate Program Committee with an award of $1,000.
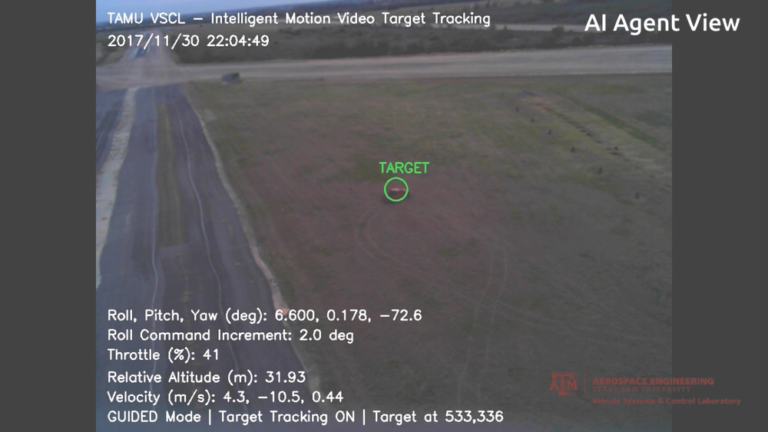
Jillian is a Master of Science student, with a focus in Dynamics & Control. She is currently on the KAMS project, working on adaptive control for multiple time scale systems. She has been in the VSCL since Spring 2023, working on flight testing for the System Identification project and extending KAMS as part of her thesis work. Jillian has an interest in flight testing, nonlinear control, and vehicle dynamics.








 C
C

 Erin Swansen joins VSCL as a Ph.D. transfer student in the Aerospace Engineering department. Erin has over five years of experience in industry at
Erin Swansen joins VSCL as a Ph.D. transfer student in the Aerospace Engineering department. Erin has over five years of experience in industry at  Payton Clem is a Master of Science Student in the Aerospace Engineering department. She is graduating from Texas A&M with her Bachelor of Science in Aerospace Engineering with Minors in Mathematics and Astrophysics in Fall 2023. During her undergrad, she was involved in campus activities like working at the Memorial Student Center to provide support to her fellow Aggies, and was a member of
Payton Clem is a Master of Science Student in the Aerospace Engineering department. She is graduating from Texas A&M with her Bachelor of Science in Aerospace Engineering with Minors in Mathematics and Astrophysics in Fall 2023. During her undergrad, she was involved in campus activities like working at the Memorial Student Center to provide support to her fellow Aggies, and was a member of 