









V SCL graduate student M.D. Sunbeam will present a workshop paper on 29 July at the 2023 International Conference on Machine Learning (ICML) in Honolulu, Hawaii.
SCL graduate student M.D. Sunbeam will present a workshop paper on 29 July at the 2023 International Conference on Machine Learning (ICML) in Honolulu, Hawaii.
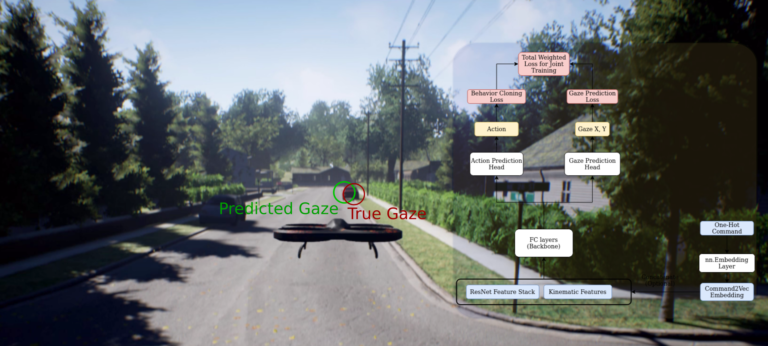
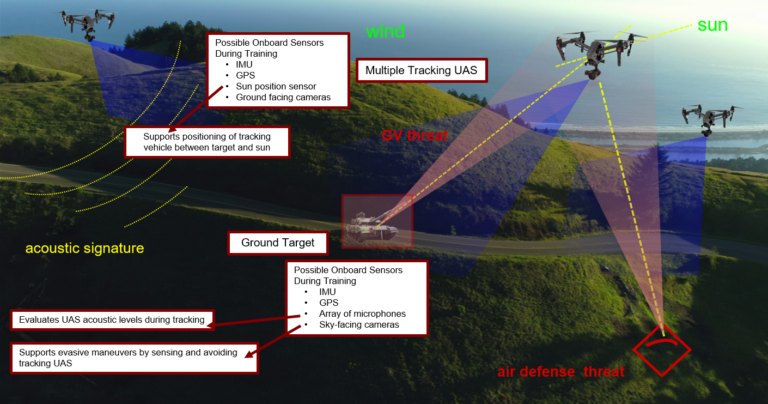
Sunbeam will be presenting the paper “Imitation Learning with Human Eye Gaze via Multi-Objective Prediction,”. Approaches for teaching learning agents via human demonstrations have been widely studied and successfully applied to multiple domains. However, the majority of imitation learning work utilizes only behavioral information from the demonstrator, i.e. which actions were taken, and ignores other useful information. In particular, eye gaze information can give valuable insight towards where the demonstrator is allocating visual attention, and holds the potential to improve agent performance and generalization. In this work, we propose Gaze Regularized Imitation Learning (GRIL), a novel context-aware, imitation learning architecture that learns concurrently from both human demonstrations and eye gaze to solve tasks where visual attention provides important context.

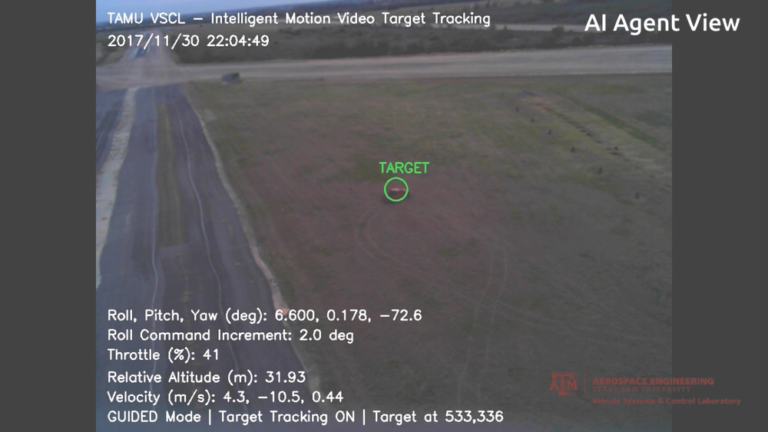
We apply GRIL to a visual navigation task, in which an unmanned quadrotor is trained to search for and navigate to a target vehicle in a photorealistic simulated environment. We show that GRIL outperforms several state-of-the-art gaze-based imitation learning algorithms, simultaneously learns to predict human visual attention, and generalizes to scenarios not present in the training data. Supplemental videos can be found at https://sites.google.com/view/gaze-regularized-il/, and code will be made available.
 Jillian Bennett is a Masters of Science student in the Aerospace Engineering department. She graduated with her Bachelors of Science in Aerospace Engineering and Minor in Mathematics in Fall 2023. As an undergraduate she interned with Los Alamos National Laboratory and TAMU Material Science and Engineering, working on characterizing impacted materials. Additionally she was the lead ambassador for the Aerospace Ambassador program and a Fish Camp chair. Her work with VSCL will be primarily focused on
Jillian Bennett is a Masters of Science student in the Aerospace Engineering department. She graduated with her Bachelors of Science in Aerospace Engineering and Minor in Mathematics in Fall 2023. As an undergraduate she interned with Los Alamos National Laboratory and TAMU Material Science and Engineering, working on characterizing impacted materials. Additionally she was the lead ambassador for the Aerospace Ambassador program and a Fish Camp chair. Her work with VSCL will be primarily focused on  2nd Lieutenant Noah Luna is a Masters of Science student in the Aerospace Engineering Department. He graduated from the United States Air Force Academy with a Bachelors of Science in Aeronautical Engineering and Computer Science. During his undergraduate studies, he performed research on a neural network based flight control system for an ongoing fixed-wing project through the Air Force Research Lab (AFRL). Additionally, he completed an internship and further research with Lockheed Martin Skunk Works as a Software and Flight Test engineer developing nonlinear adaptive flight controls for aerial systems. At VSCL, Noah will be working on
2nd Lieutenant Noah Luna is a Masters of Science student in the Aerospace Engineering Department. He graduated from the United States Air Force Academy with a Bachelors of Science in Aeronautical Engineering and Computer Science. During his undergraduate studies, he performed research on a neural network based flight control system for an ongoing fixed-wing project through the Air Force Research Lab (AFRL). Additionally, he completed an internship and further research with Lockheed Martin Skunk Works as a Software and Flight Test engineer developing nonlinear adaptive flight controls for aerial systems. At VSCL, Noah will be working on 


 This paper presents a summary of system identification flight testing and results for a variety of large and small fixed-wing and multirotor Unmanned Air Systems at Texas A&M University from 1999-2023. The six different types of vehicles range from a large powered-parafoil, to a fixed-wing vehicle with synthetic jet actuated roll control effectors, to a radially asymmetric multirotor, to large and small fixed-wing vehicles, and a Steppe eagle. The Observer/Kalman Filter Identification algorithm is used to generate linear time invariant state-space models, and results for both near real-time online model generation, and post-flight offline model generation are presented. The use and efficacy of a variety of test input types and their sensitivity to exogenous inputs such as turbulence, in addition to identified model evaluation and selection criteria are discussed. Several generations of low size, weight, power, and cost flight test instrumentation including the Developmental Flight Test Instrumentation data acquisition package are also presented. Challenges that arose from the flight testing campaigns along with solutions are highlighted in the paper.
This paper presents a summary of system identification flight testing and results for a variety of large and small fixed-wing and multirotor Unmanned Air Systems at Texas A&M University from 1999-2023. The six different types of vehicles range from a large powered-parafoil, to a fixed-wing vehicle with synthetic jet actuated roll control effectors, to a radially asymmetric multirotor, to large and small fixed-wing vehicles, and a Steppe eagle. The Observer/Kalman Filter Identification algorithm is used to generate linear time invariant state-space models, and results for both near real-time online model generation, and post-flight offline model generation are presented. The use and efficacy of a variety of test input types and their sensitivity to exogenous inputs such as turbulence, in addition to identified model evaluation and selection criteria are discussed. Several generations of low size, weight, power, and cost flight test instrumentation including the Developmental Flight Test Instrumentation data acquisition package are also presented. Challenges that arose from the flight testing campaigns along with solutions are highlighted in the paper. VSCL Graduate Research Assistant and Ph.D Student Chris Leshikar has been selected for a Summer 2023 internship with the
VSCL Graduate Research Assistant and Ph.D Student Chris Leshikar has been selected for a Summer 2023 internship with the  VSCL Graduate Research Assistant and Ph.D Student Hannah Lehman has been selected for a Summer 2023 research internship at
VSCL Graduate Research Assistant and Ph.D Student Hannah Lehman has been selected for a Summer 2023 research internship at  VSCL Graduate Research Assistant and MS student MD-Nazmus Sunbeam has been selected for a Summer 2023 internship with
VSCL Graduate Research Assistant and MS student MD-Nazmus Sunbeam has been selected for a Summer 2023 internship with VSCL Graduate Research Assistant and MS Student Cassie-Kay McQuinn has been selected for a Summer 2023 research internship at the
VSCL Graduate Research Assistant and MS Student Cassie-Kay McQuinn has been selected for a Summer 2023 research internship at the  VSCL Graduate Research Assistant
VSCL Graduate Research Assistant 





 VSCL hosted Dr. Dimitra Panagou, Associate Professor with the
VSCL hosted Dr. Dimitra Panagou, Associate Professor with the ) successfully defended his Ph.D. dissertation titled “Multiple-Timescale Adaptive Control for Uncertain Nonlinear Dynamical Systems”. Kameron’s dissertation investigated combining nonlinear multiple time-scale controllers that VSCL has been researching for the last 15 years, with adaptive controllers which VSCL has been researching for more than 20 years. Multiple-timescale control has been shown to have difficulty with uncertain systems and adaptive control has been shown to have difficulty with multiple-timescale systems. His dissertation describes a novel control methodology called [K]Control of Adaptive Multiple-timescale Systems (KAMS). KAMS seeks to address systems that simultaneously exhibit uncertain and multiple-timescale behaviors. Unlike traditional multiple-timescale control literature, KAMS uses adaptive control to stabilize the subsystems. The reference models and adapting parameters used in adaptive control significantly complicate the stability analysis. KAMS is a flexible theory and framework and the stability proofs apply to a wide array of adaptive algorithms and multiple-timescale fusion techniques. Additionally, formal and numerical validation of how KAMS can relax the minimum phase assumption for a multitude of common adaptive control methods. KAMS is demonstrated and evaluated on examples consisting of stabilization and attitude control of a quadrotor Unmanned Air System; fuel-efficient orbital transfer maneuvers; and preventing inlet unstart on hypersonic aircraft.
) successfully defended his Ph.D. dissertation titled “Multiple-Timescale Adaptive Control for Uncertain Nonlinear Dynamical Systems”. Kameron’s dissertation investigated combining nonlinear multiple time-scale controllers that VSCL has been researching for the last 15 years, with adaptive controllers which VSCL has been researching for more than 20 years. Multiple-timescale control has been shown to have difficulty with uncertain systems and adaptive control has been shown to have difficulty with multiple-timescale systems. His dissertation describes a novel control methodology called [K]Control of Adaptive Multiple-timescale Systems (KAMS). KAMS seeks to address systems that simultaneously exhibit uncertain and multiple-timescale behaviors. Unlike traditional multiple-timescale control literature, KAMS uses adaptive control to stabilize the subsystems. The reference models and adapting parameters used in adaptive control significantly complicate the stability analysis. KAMS is a flexible theory and framework and the stability proofs apply to a wide array of adaptive algorithms and multiple-timescale fusion techniques. Additionally, formal and numerical validation of how KAMS can relax the minimum phase assumption for a multitude of common adaptive control methods. KAMS is demonstrated and evaluated on examples consisting of stabilization and attitude control of a quadrotor Unmanned Air System; fuel-efficient orbital transfer maneuvers; and preventing inlet unstart on hypersonic aircraft. Kameron Eves will be presenting the paper “Adaptive Control for Non-minimum Phase Systems Via Time Scale Separation,”. Adaptive control for non-minimum phase systems remains a challenging problem. Eves proposes a method of adaptive control for systems that may be both nonlinear and non-minimum phase. This is accomplished by exploiting time scale separation between the internal and external dynamics.
Kameron Eves will be presenting the paper “Adaptive Control for Non-minimum Phase Systems Via Time Scale Separation,”. Adaptive control for non-minimum phase systems remains a challenging problem. Eves proposes a method of adaptive control for systems that may be both nonlinear and non-minimum phase. This is accomplished by exploiting time scale separation between the internal and external dynamics.