









Hannah Lehman successfully defended her Ph.D. dissertation on May 27th, 2025. Hannah has been with VSCL since her freshman year in Spring 2017, for a total of 8.42 years with VSCL during which she implemented the Theory-Computation-Experiment paradigm. The title of her dissertation is: Hierarchical Auctions for the Coordination of Heterogeneous Agents using Machine Learning
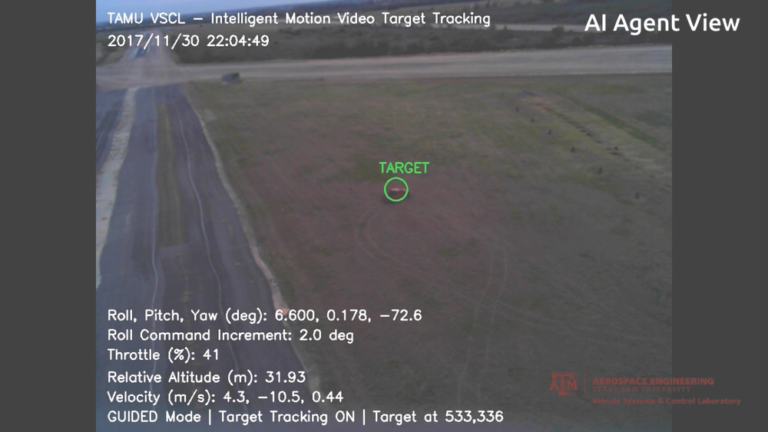
Hannah’s dissertation investigates autonomous multiagent coordination. Machine learning has long been discussed as a candidate for facilitating autonomous multiagent vehicle coordination. Many methods of autonomous multiagent coordination have been proposed, however few if any solutions consider realistic communication challenges. By using machine learning on multiple levels, and a self organizing hierarchical system, an autonomous, pseudo decentralized, heterogeneous, system can dynamically complete tasks without being fully connected. This approach, called Hierarchical Auctions for the Coordination of Heterogeneous Agents (HACHA) will be investigated and demonstrated on four simple, proof of concept simulations. Each simulation scenario is designed to demonstrate HACHA’s applicability to a different subset of multiagent problems and address specific requirements. Within HACHA, specific algorithm and data choices will be motivated real-world hardware constraints and informed by time complexity analysis of sub-algorithms. Results show that a parallel auction coordination framework can be used to organize multiple heterogeneous agents with different sensors, movement modalities, graph connectedness, and controllers to complete a task requiring multiple agents. The auction framework is independent of individual agents and has been utilized in this paper by a combination of reinforcement learning trained agents and optimally controlled agents to complete tasks. HACHA auction propagation methods are explored and recommended use case rules are developed based on theoretical and computational investigations and results. The HACHA auction choice is explored and compared to other popular auction methods over a variety of relevant network characteristics including dynamicism, sparsity, and number of tasks.
Hannah will be doing a short postdoc with VSCL and then starting full-time at Sandia National Laboratories, where she has now done four graduate internships, in July. Hannah’s is the 62nd graduate degree advised by Dr. John Valasek and the 15th Ph.D. student.

 Jillian was honored at the Texas A&M University’s Graduate and Professional School’s 2025 Spring Awards Ceremony with the Outstanding Mentoring Award for Graduate and Professional Students. This award recognizes and honors individuals who have demonstrated exceptional commitment to mentoring undergraduate students or peers. Jill is passionate about mentoring students through her lab and organizations like Sigma Gamma Tau and the aerospace honor society, helping women navigate school and life stressors while pursuing aerospace engineering opportunities. Congratulations Jill!
Jillian was honored at the Texas A&M University’s Graduate and Professional School’s 2025 Spring Awards Ceremony with the Outstanding Mentoring Award for Graduate and Professional Students. This award recognizes and honors individuals who have demonstrated exceptional commitment to mentoring undergraduate students or peers. Jill is passionate about mentoring students through her lab and organizations like Sigma Gamma Tau and the aerospace honor society, helping women navigate school and life stressors while pursuing aerospace engineering opportunities. Congratulations Jill!








 Zach Curtis is graduated from
Zach Curtis is graduated from 

