









VSCL Graduate Research Assistant Emily Fojtik graduated with her Master of Engineering degree in May 2019 and has been hired by VectorNav Technologies, Dallas, TX. Emily will be working as a Test Engineer with a principal focus of automating and expediting the verification and validation of products at VectorNav. Emily started working with VSCL in the Spring of 2016, with her major roles including managing the Texas A&M University Engineering Flight Simulator and developing a means for evaluating human factors aspects for Head Mounted Displays (HMD) for Enhanced Vision System technologies.
VSCL Graduate Research Assistant Zeke Bowden graduated with his Master of Engineering degree in June 2019 and has been hired by Lockheed Martin Aeronautics Company, Fort Worth, TX. Zeke started working with VSCL in the Fall of 2014, and as one of the principal pilots with a Remote Pilot Certificate and Certified UAS Operator, has played a key role in every Unmanned Air System (UAS) project as either a UAS pilot or as a flight test engineer. He had previously done a summer internship as a flight test engineer at Insitu Inc., Hood River, OR.









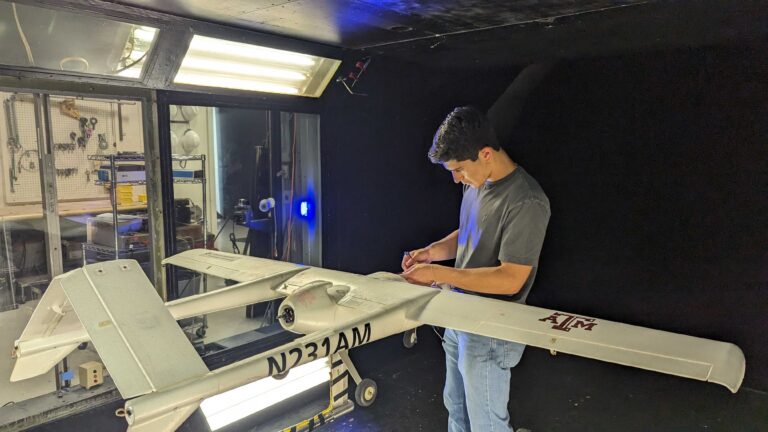
 Pegasus has 80+ flights at the Texas A&M University RELLIS campus, out of its design life of
Pegasus has 80+ flights at the Texas A&M University RELLIS campus, out of its design life of 
