









 VSCL student Blake Krpec, who will graduate with his Master of Science degree in May 2022, has defended his thesis “Vision-Based Marker-Less Landing of a UAS On a Moving Ground Vehicle”. Blake’s defense had 34 people in attendance including many in attendance from the Army Research Lab. His committee is Drs. Reza Langari, Manoranjan Majji, Srikanth Saripalli, and Stephen Nogar (special committee member from Army Research Laboratory and the Technical Monitor). His research is supported as a Journeyman Fellow by the Army Research Laboratory (ARL) on an Oak Ridge Associated Universities (ORAU) Fellowship. Blake has been working with VSCL for 7 years after joining as a freshman. After graduation, Blake will work with Southwest Research Institute in San Antonio, TX.
VSCL student Blake Krpec, who will graduate with his Master of Science degree in May 2022, has defended his thesis “Vision-Based Marker-Less Landing of a UAS On a Moving Ground Vehicle”. Blake’s defense had 34 people in attendance including many in attendance from the Army Research Lab. His committee is Drs. Reza Langari, Manoranjan Majji, Srikanth Saripalli, and Stephen Nogar (special committee member from Army Research Laboratory and the Technical Monitor). His research is supported as a Journeyman Fellow by the Army Research Laboratory (ARL) on an Oak Ridge Associated Universities (ORAU) Fellowship. Blake has been working with VSCL for 7 years after joining as a freshman. After graduation, Blake will work with Southwest Research Institute in San Antonio, TX.
VSCL Postdoctoral Researcher Sangwoo Moon Joins JPL
 Dr. Sangwoo Moon, postdoctoral researcher in VSCL, has accepted a position as a Postdoctoral Fellow with NASA’s Jet Propulsion Laboratory. Dr. Moon will be working with the JPL Robotics Group, Robotic Aerial Mobility. His work at JPL will be mainly focused on communication-aware decision making and perception approaches for multi-robot systems. The work will include software development/integration for data fusion and multi-level planning/control, simulation verification/
Dr. Sangwoo Moon, postdoctoral researcher in VSCL, has accepted a position as a Postdoctoral Fellow with NASA’s Jet Propulsion Laboratory. Dr. Moon will be working with the JPL Robotics Group, Robotic Aerial Mobility. His work at JPL will be mainly focused on communication-aware decision making and perception approaches for multi-robot systems. The work will include software development/integration for data fusion and multi-level planning/control, simulation verification/
Dr. Moon has worked with VSCL since March 2021. As a research engineer, he was involved in the hardware/software implementation for large hexacopter platforms. He particularly developed specialized hardware and software components for the vehicles consisting of a battery monitoring system, onboard computer set up for planning and guidance, and terrain-following algorithms. He worked with VSCL flight crews to evaluate the vehicles, in which his team including himself took flight tests of over 200 sorties and 60 hours of flight time. He contributed to the successful demonstration of a cooperative zone recon mission with four large hexarotors for searching unknown ground moving targets.
Valasek Presents at 6th Annual UAS Handling Qualities Workshop

Dr. John Valasek
Dr. John Valasek, Professor in the Department of Aerospace Engineering at Texas A&M University and Director of the Vehicle Systems & Control Laboratory, gave a virtual seminar titled “Flight Results of Autopilot Gain Tuning for Large Hexacopter Handling Qualities” for the 6th Annual UAS Handling Qualities Workshop. The date of the seminar was 28 January 2022.
Spring 2022 FoRCE Online Seminar by Valasek – January 28 at 11:00 Central Time
Dr. John Valasek
Seminar 1: Multiple-Time-Scale Nonlinear Output Feedback Control of Systems With Model Uncertainties (Dr. John Valasek)
WebEx Link: https://force.my.webex.com/force.my/j.php?MTID=mba10bd9e12f5b612d2adc2b79c1c7d2f
Meeting number (access code): 2550 544 5654
Meeting password: neCev2rfT35 (63238273 from phones and video systems)
Abstract: Systems with dynamics evolving in distinct slow and fast timescales include aircraft (Khalil & Chen, 1990), robotic manipulators, (Tavasoli, Eghtesad, & Jafarian, 2009), electrical power systems (Sauer, 2011), chemical reactions (Mélykúti, Hespanha, & Khammash, 2014), production planning in manufacturing (Soner, 1993), and so on. The Geometric Singular Perturbation theory (Fenichel, 1979) is a powerful control law development tool for multiple-timescale systems because it provides physical insight into the evolution of the states in more than one timescale. The behaviour of the full-order system can be approximated by the slow subsystem, provided that the fast states can be stabilised on an equilibrium manifold. The fast subsystem describes how the fast states evolve from their initial conditions to their equilibrium trajectory or the manifold. This presentation develops two nonlinear, multiple-time-scale, output feedback tracking controllers for a class of nonlinear, nonstandard systems with slow and fast states, slow and fast actuators, and model uncertainties. The class of systems is motivated by aircraft with uncertain inertias, control derivatives, engine time-constant, and without direct measurement of angle-of-attack and sideslip angle. One controller achieves the control objective of slow state tracking, while the other does simultaneous slow and fast state tracking. Each controller is synthesized using time-scale separation, lower-order reduced subsystems, and estimates of unknown parameters and unmeasured states. The estimates are updated dynamically, using an online parameter estimator and a nonlinear observer. The update laws are so chosen that errors remain ultimately bounded for the full-order system. The controllers are simulated on a six-degree-of-freedom, high-performance aircraft model commanded to perform a demanding, combined longitudinal and lateral/directional maneuver. Even though two important aerodynamic angles are not measured, tracking is adequate and as good as a previously developed full-state feedback controller handling similar parametric uncertainties. Additionally, even though the two controllers in theory achieve two different control objectives, it is possible to choose either one of them for the same maneuver. Of the two new output feedback controllers, the slow state tracker accomplishes the maneuver with less control effort, while the simultaneous slow and fast state tracker does so with a smaller number of gains to tune.
VSCL student Ritwik Bera Defends Master of Science Thesis
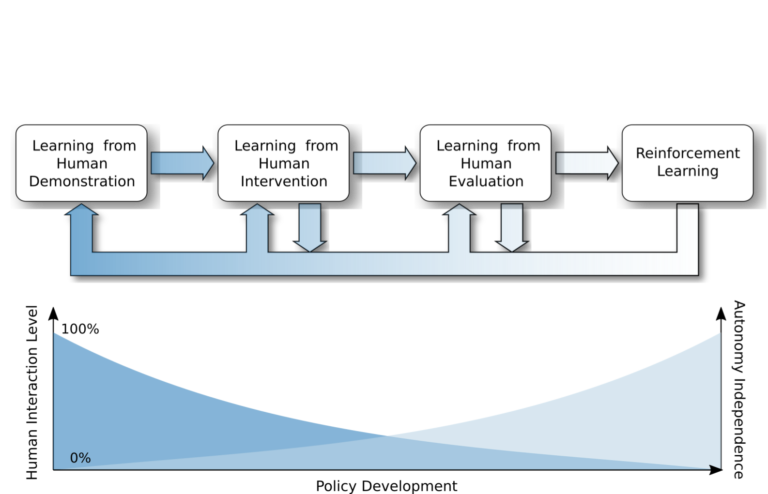
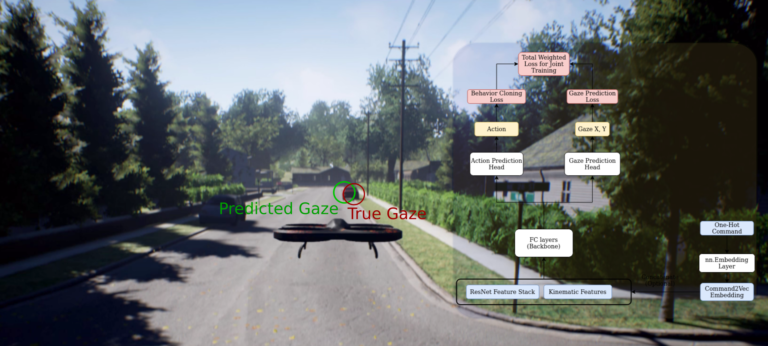
 VSCL student Ritwik Bera, who will graduate with his Master of Science degree in May 2022, has defended his thesis “A Modular Framework for Training Autonomous Systems via Human Interaction”. Bera joined VSCL in 2019 after having spent a summer working with the lab in 2017. Bera previously participated in summer a internships at Zoox in Summer 2021. After graduation, Bera will work with Zoox in Foster CIty, CA as a Software Engineer in the Planning and Control department working on trajectory generation algorithms.
VSCL student Ritwik Bera, who will graduate with his Master of Science degree in May 2022, has defended his thesis “A Modular Framework for Training Autonomous Systems via Human Interaction”. Bera joined VSCL in 2019 after having spent a summer working with the lab in 2017. Bera previously participated in summer a internships at Zoox in Summer 2021. After graduation, Bera will work with Zoox in Foster CIty, CA as a Software Engineer in the Planning and Control department working on trajectory generation algorithms.
VSCL Graduate Students Present Papers at the 2022 AIAA SciTech Forum
VSCL graduate students Garrett Jares, Chris Leshikar, and Hannah Lehman will present papers in January at the 2022 AIAA SciTech Forum in San Diego, California.
 Garrett Jares ’17 will be presenting the paper “Flight Demonstration and Validation of Control Acquisition Autopilot Attack”. The paper investigated a method of cyber attack by which an attacker might take over control of a vehicle. This paper built upon prior work by demonstrating and validating the attack on a DJI F450 quadrotor running the ArduCopter autopilot. The experiments focused on two scenarios. One in which the victim performed regulation while the attacker performed non-zero setpoint control and another in which the victim performed non-zero setpoint control while the attacker performed regulation of the system. The experimental results show how the attack poses a threat to real-world UAS and evaluates its performance under different control scenarios.
Garrett Jares ’17 will be presenting the paper “Flight Demonstration and Validation of Control Acquisition Autopilot Attack”. The paper investigated a method of cyber attack by which an attacker might take over control of a vehicle. This paper built upon prior work by demonstrating and validating the attack on a DJI F450 quadrotor running the ArduCopter autopilot. The experiments focused on two scenarios. One in which the victim performed regulation while the attacker performed non-zero setpoint control and another in which the victim performed non-zero setpoint control while the attacker performed regulation of the system. The experimental results show how the attack poses a threat to real-world UAS and evaluates its performance under different control scenarios.

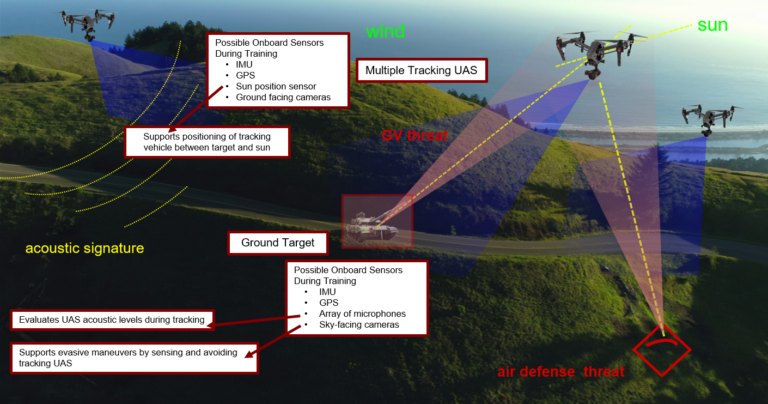
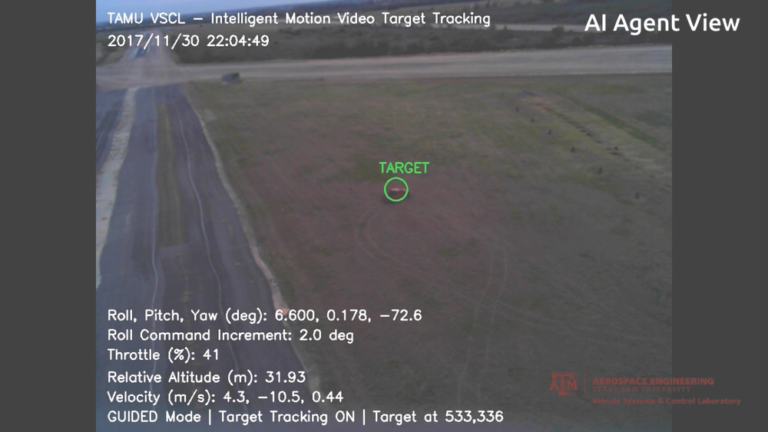
Hannah Lehman ’20 will be presenting the paper “Addressing Undesirable Emergent Behavior in Deep Reinforcement Learning UAS Ground Target Tracking”, which seeks to investigate and further understand the impact of emergent behavior in reinforcement learning controlled UAS. The paper builds on previous work by further investigating a fixed wing tracking a ground target through reinforcement learning and extends the learning environment and possible agent behavior. The emergent behavior is discovered, categorized, and mitigated through a number of algorithmic, reward, and environment modifications. These approaches are evaluated in simulation based on their ability to improve tracking and extend total tracking time.
 Chris Leshikar ’20 will be presenting the paper “System Identification Flight Testing of Inverted V-Tail small Unmanned Air System”, which addresses challenges in conducting flight testing an inverted V-Tail fixed-winged vehicle and the results obtained from the flight tests. The goal of the flight tests was to obtain longitudinal, lateral/directional and combined longitudinal lateral/directional linear state-space model for the RMRC Anaconda using the Observer\Kalman Identification (OKID) algorithm. Both manual and automated excitation signals were injected into the Anaconda. Parametric sweeps of the excitation signals were performed using the Developmental Flight Test Instrumentation Two (DFTI2) system. The identified longitudinal linear state-space model modelled the longitudinal dynamics well and the identified lateral/directional reasonably well while the identified combined longitudinal lateral/directional model showed decent correlation with the decoupled models.
Chris Leshikar ’20 will be presenting the paper “System Identification Flight Testing of Inverted V-Tail small Unmanned Air System”, which addresses challenges in conducting flight testing an inverted V-Tail fixed-winged vehicle and the results obtained from the flight tests. The goal of the flight tests was to obtain longitudinal, lateral/directional and combined longitudinal lateral/directional linear state-space model for the RMRC Anaconda using the Observer\Kalman Identification (OKID) algorithm. Both manual and automated excitation signals were injected into the Anaconda. Parametric sweeps of the excitation signals were performed using the Developmental Flight Test Instrumentation Two (DFTI2) system. The identified longitudinal linear state-space model modelled the longitudinal dynamics well and the identified lateral/directional reasonably well while the identified combined longitudinal lateral/directional model showed decent correlation with the decoupled models.
VSCL Student Cassie-Kay McQuinn Graduates with Bachelor of Science
VSCL Undergraduate Cassie-Kay McQuinn graduated on December 17, 2021 with her Bachelor of Science degree in Aerospace Engineering with Summa Cum Laude and Engineering Honors. Cassie-Kay will be joining VSCL as a M.S. student starting in Spring 2022. She has been an active member of VSCL since Fall 2021, working in system identification. In addition to completing Engineering Honors, she is a Presidential Endowed Scholar, the 2021 Aerospace Engineering Advisory Board Scholarship recipient, and has earned a certificate of Holistic Leadership in Engineering through completion of the Zachry Leadership Program. She is the current Vice President of the Texas A&M chapter of the Sigma Gamma Tau Aerospace Engineering Honor Society. As an undergraduate she interned with L3Harris Technologies working in the Structural Analysis and Structural Design departments. Cassie-Kay’s main interests include flight test engineering, aircraft dynamics and system identification.

VSCL welcomes incoming PhD student Maison Clouatre for Fall 2022
 Maison Clouatre is an incoming Ph.D. student in the aerospace engineering department. He will graduate in May 2022 with a double major in electrical engineering and mathematics from Mercer University. As an undergraduate, Clouatre held visiting research positions in the Electronic Systems (ELSYS) Laboratory at the Georgia Tech Research Institute (GTRI), the Vehicle Systems & Control Laboratory (VSCL) at Texas A&M University, and the Laboratory for Information & Decision Systems (LIDS) at the Massachusetts Institute of Technology (MIT). His research interests lay at the intersection of control theory, optimization, and learning, and he focuses on applying his theory to the fields of quantum information science and aerospace engineering. Clouatre is both a Goldwater Scholar and Stamps Scholar. At VSCL, Clouatre will research quantum control and learning for quantum dynamics.
Maison Clouatre is an incoming Ph.D. student in the aerospace engineering department. He will graduate in May 2022 with a double major in electrical engineering and mathematics from Mercer University. As an undergraduate, Clouatre held visiting research positions in the Electronic Systems (ELSYS) Laboratory at the Georgia Tech Research Institute (GTRI), the Vehicle Systems & Control Laboratory (VSCL) at Texas A&M University, and the Laboratory for Information & Decision Systems (LIDS) at the Massachusetts Institute of Technology (MIT). His research interests lay at the intersection of control theory, optimization, and learning, and he focuses on applying his theory to the fields of quantum information science and aerospace engineering. Clouatre is both a Goldwater Scholar and Stamps Scholar. At VSCL, Clouatre will research quantum control and learning for quantum dynamics.
VSCL Undergraduates Awarded Scholarships at Fall Aerospace Engineering Award Ceremony

VSCL undergraduates Alex Gross ’23, Cassie-Kay McQuinn ’21, and Leah Davis ’22 were awarded Aerospace Engineering Scholarships at the Fall Aerospace Engineering Award ceremony this semester.
VSCL undergraduate students Alex Gross ’23 and Leah Davis ’22 were awarded the Benjamin R and Deanna J Smith Scholarship. The scholarship is awarded to 5 outstanding undergraduate students selected by the donors for their academic merit. Alex is a Junior in Aerospace Engineering with minors in Computer Science and Mathematics. He is expected to graduate in May 2023 and has been a member of VSCL since Spring 2020. Leah Davis will graduate in May 2022.
VSCL undergraduate Cassie-Kay McQuinn ’21 was awarded the Aerospace Engineering Advisory Board Scholarship. The scholarship is awarded to an outstanding student in the Department of Aerospace Engineering at Texas A&M. Selection criteria includes: leadership/professional involvement, academic success and service to the department. Cassie is a Senior and will graduate in December from Texas A&M University with a B.S. in Aerospace Engineering with Engineering Honors. She has been a member of VSCL since Spring 2021 and will be continuing her work with VSCL as a Master of Science student in Spring 2022.
VSCL Welcomes New MS Student Cassie-Kay McQuinn for Spring 2022
 Cassie-Kay McQuinn ’21 is an M.S. student in the aerospace engineering department. Cassie-Kay has been an active member of VSCL since Fall 2021, working in system identification. She will graduate in December from Texas A&M University with a B.S. in Aerospace Engineering with Engineering Honors. In addition to completing Engineering Honors, she is a Presidential Endowed Scholar, the 2021 Aerospace Engineering Advisory Board Scholarship recipient, and has earned a certificate of Holistic Leadership in Engineering through completion of the Zachry Leadership Program. She is the current Vice President of the Texas A&M chapter of the Sigma Gamma Tau Aerospace Engineering Honor Society. As an undergraduate she interned with L3Harris Technologies working in the Structural Analysis and Structural Design departments. Cassie-Kay’s main interests include flight test engineering, aircraft dynamics and system identification.
Cassie-Kay McQuinn ’21 is an M.S. student in the aerospace engineering department. Cassie-Kay has been an active member of VSCL since Fall 2021, working in system identification. She will graduate in December from Texas A&M University with a B.S. in Aerospace Engineering with Engineering Honors. In addition to completing Engineering Honors, she is a Presidential Endowed Scholar, the 2021 Aerospace Engineering Advisory Board Scholarship recipient, and has earned a certificate of Holistic Leadership in Engineering through completion of the Zachry Leadership Program. She is the current Vice President of the Texas A&M chapter of the Sigma Gamma Tau Aerospace Engineering Honor Society. As an undergraduate she interned with L3Harris Technologies working in the Structural Analysis and Structural Design departments. Cassie-Kay’s main interests include flight test engineering, aircraft dynamics and system identification.