



Boeing Phantom Works Through Sargent Fletcher, Inc. and StarVision Technologies
1 November 2003 – 30 October 2007
Total Award $358,000
A high fidelity AAR simulation will mitigate the risk associated with these demonstrations, particularly the air-to-ground and air-to-air flight tests. While simulations of individual components, such as the VisNav sensor, have already been implemented, no comprehensive simulation has been created that realistically captures the behavior of the combined AAR system (sensors, controller, tanker, and receiver). Such a simulation will allow for the identification and resolution of system deficiencies before flight testing, where unforeseen problems are more costly in terms of schedule and budget.
The simulation will be used to 1) validate the adequacy of the VisNav navigation solution, 2) validate the proposed controller in terms of performance and robustness, and 3) generate a set of operating conditions where the system is expected to perform. The simulation will be able to test scenarios involving various tanker and receiver vehicle relative range and velocities, various lighting conditions, and disturbance effects.
Working with me on this program are Graduate Research Assistants:
- Roshawn E. Bowers
- Changwha Cho
- Jeff Morris
- Tom Wagner
 NASA has chosen Texas A&M University to lead the Texas Institute of Intelligent Bio-Nano Materials and Structures for Aerospace Vehicles (TiiMS), bringing together some of the top researchers in Texas and the world — including a Nobel laureate and several members of the National Academies — in biotechnology, nanotechnology, biomaterials and aerospace engineering to develop the next generation of bio-nano materials and structures for aerospace vehicles. The technical scope for the institute focuses on basic research issues underlying the major theme of TiiMS — the marriage of biotechnology with nanotechnology to enable the development of intelligent reconfigurable aerospace structures.
NASA has chosen Texas A&M University to lead the Texas Institute of Intelligent Bio-Nano Materials and Structures for Aerospace Vehicles (TiiMS), bringing together some of the top researchers in Texas and the world — including a Nobel laureate and several members of the National Academies — in biotechnology, nanotechnology, biomaterials and aerospace engineering to develop the next generation of bio-nano materials and structures for aerospace vehicles. The technical scope for the institute focuses on basic research issues underlying the major theme of TiiMS — the marriage of biotechnology with nanotechnology to enable the development of intelligent reconfigurable aerospace structures.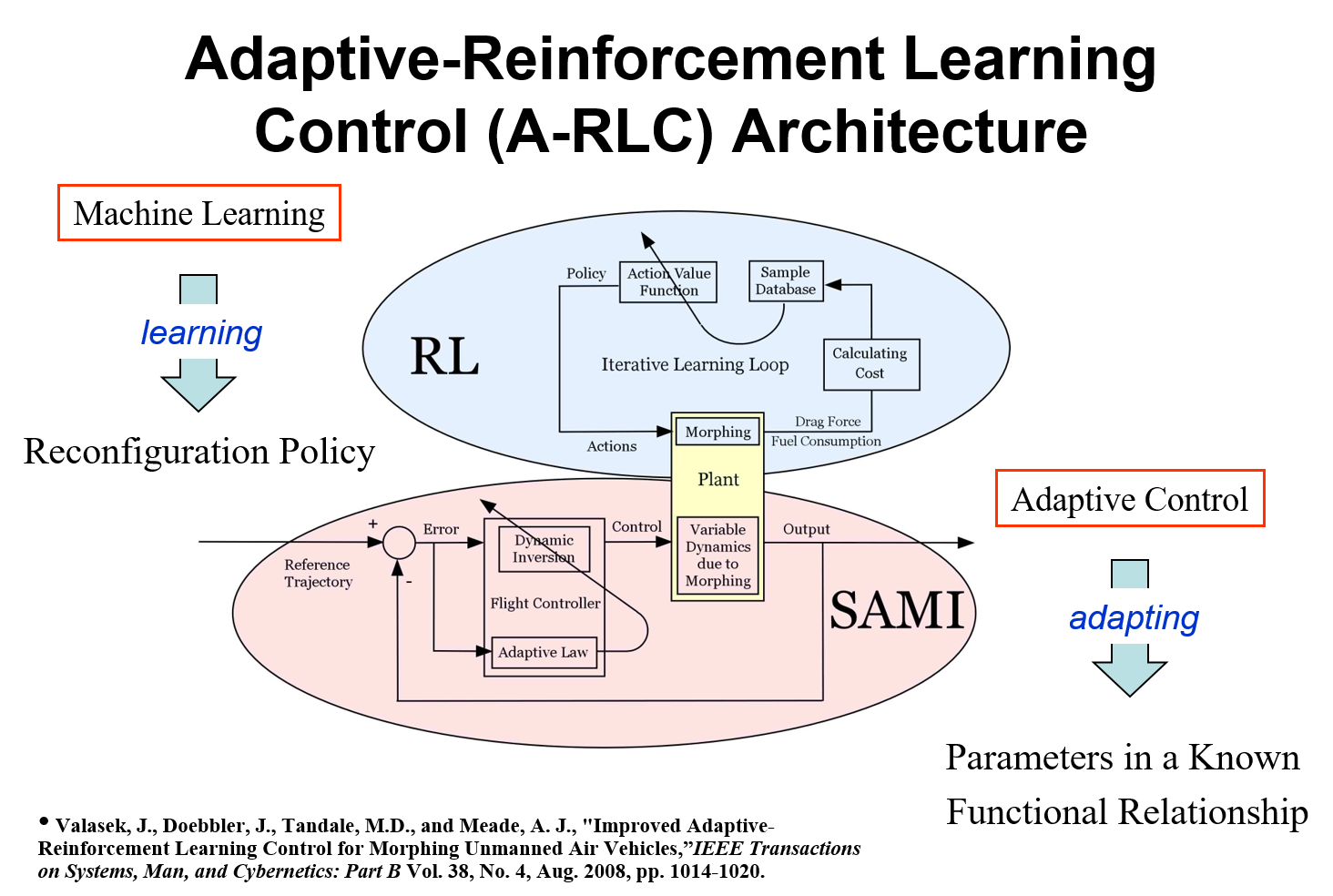 Research Objective 1: Characterization of Shape Memory Alloys using an Artificial Intelligence approach. The capability to control shape modifications of Shape Memory Alloy materials benefits from accurate models of the voltage/current-force/deformation relationships. These models are typically developed from a constitutive relation for the Shape Memory Alloy behavior which is then integrating into a structural model. The characterization approach used here does not need a constitutive model, but uses Reinforcement Learning to directly learn an input-output mapping characterization from physical experimentation, in real-time. This has the potential to significantly simplify and speed up the characterization process. Adaptive-Reinforcement Learning Control (A-RLC), a computational method that we created and developed, is being used to bridge the gap from numerical simulation to physical experimentation. We have designed and built a bench-test rig to validate the approach, and besides characterization, an optimal control policy is determined that learns how to control the shape of a Shape Memory Alloy to a specified length.
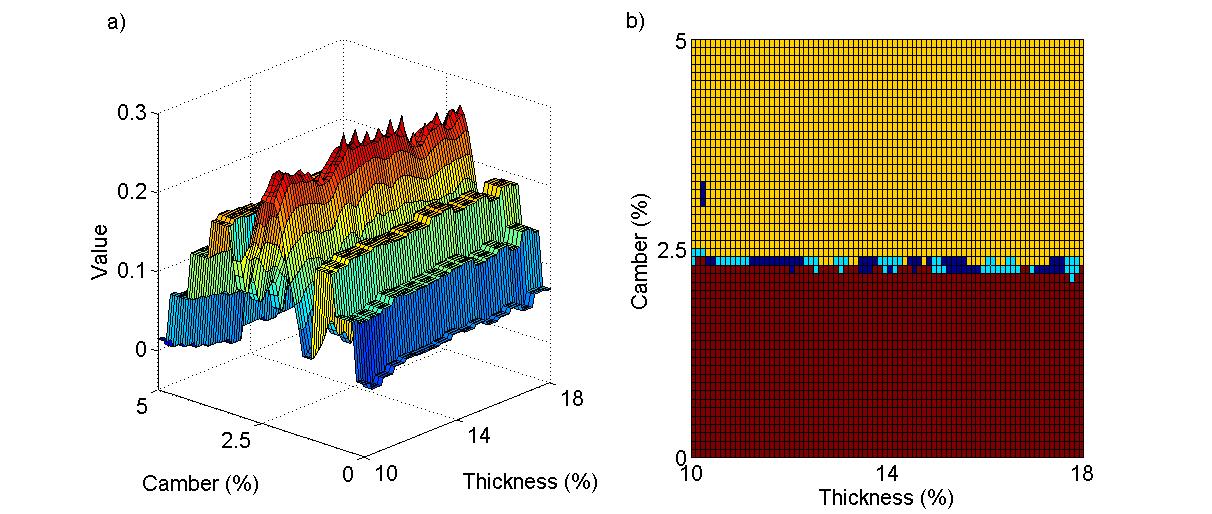
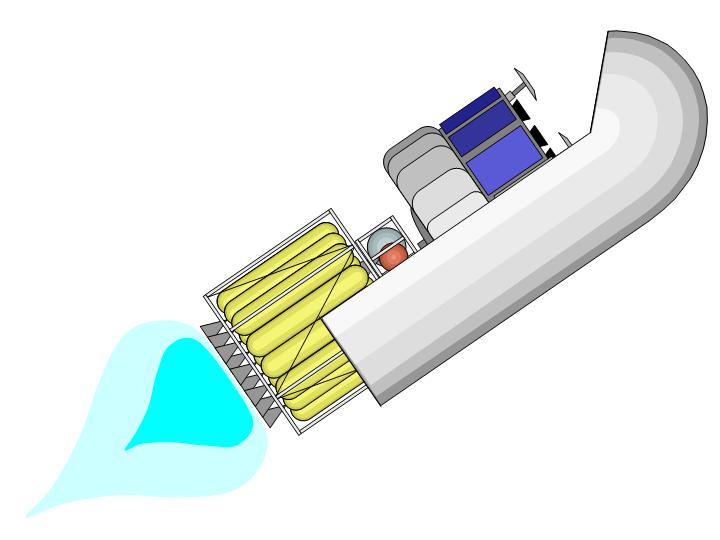
Research Objective 1: Characterization of Shape Memory Alloys using an Artificial Intelligence approach. The capability to control shape modifications of Shape Memory Alloy materials benefits from accurate models of the voltage/current-force/deformation relationships. These models are typically developed from a constitutive relation for the Shape Memory Alloy behavior which is then integrating into a structural model. The characterization approach used here does not need a constitutive model, but uses Reinforcement Learning to directly learn an input-output mapping characterization from physical experimentation, in real-time. This has the potential to significantly simplify and speed up the characterization process. Adaptive-Reinforcement Learning Control (A-RLC), a computational method that we created and developed, is being used to bridge the gap from numerical simulation to physical experimentation. We have designed and built a bench-test rig to validate the approach, and besides characterization, an optimal control policy is determined that learns how to control the shape of a Shape Memory Alloy to a specified length.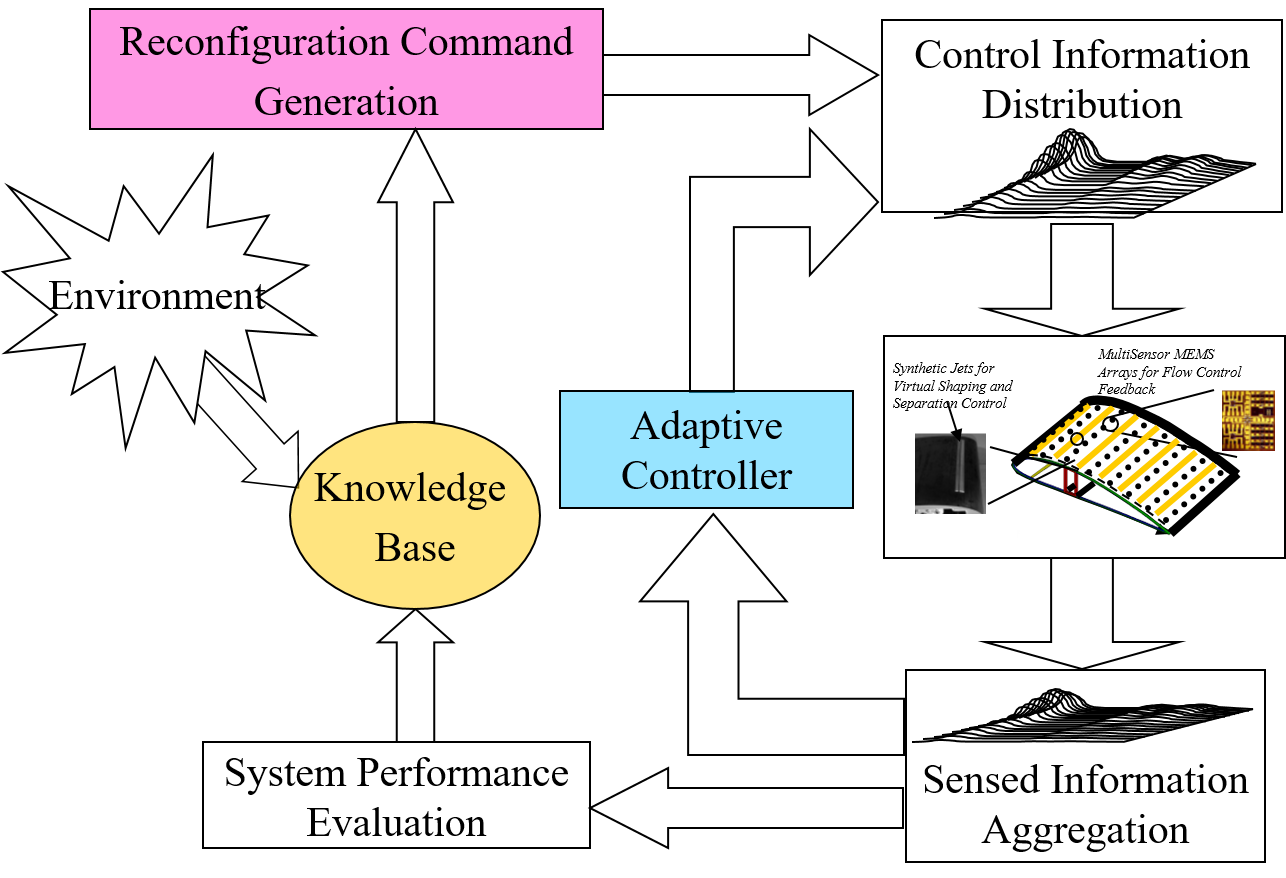 Research Objective 2: Intelligent shape changing control of morphing air vehicles that use distributed actuation and sensing on a massive scale. The Defense Advanced Research Projects Agency (DARPA) uses the definition of an air vehicle that is able to change its state substantially (to the order of 50% more wing area or wing span and chord) to adapt to changing mission environments, thereby providing superior system capability that is not possible without reconfiguration. We are developing an Adaptive-Reinforcement Learning Control (A-RLC) methodology to the problem of Morphing for Mission Adaptation. A-RLC is a marriage of traditional feedback control and Artifcial Intelligence intended to address two of the three essential functionalities for a morphing vehicle: how to reconfigure, and learning to reconfigure. The third is knowing when to reconfigure. A-RLC uses Structured Adaptive Model Inversion (SAMI) as the controller for tracking trajectories and handling time-varying properties, parametric uncertainties, un-modeled dynamics, and disturbances. Reinforcement Learning with a Q-Learning algorithm is used to learn how to produce the optimal shape at every flight condition over the life of the aircraft. Important aspects of nonlinear, massively distributed actuation and sensing systems are control effector saturation and stability. We are developing a rigorous theoretical framework that addresses these aspects. The A-RLC methodology will be demonstrated with a numerical simultation example of 3-D delta wing unmanned air vehicle that can morph in all three spatial dimensions, over a set of optimal shapes corresponding to specified flight conditions, while tracking a specified trajectory in the presence of disturbances.
Research Objective 2: Intelligent shape changing control of morphing air vehicles that use distributed actuation and sensing on a massive scale. The Defense Advanced Research Projects Agency (DARPA) uses the definition of an air vehicle that is able to change its state substantially (to the order of 50% more wing area or wing span and chord) to adapt to changing mission environments, thereby providing superior system capability that is not possible without reconfiguration. We are developing an Adaptive-Reinforcement Learning Control (A-RLC) methodology to the problem of Morphing for Mission Adaptation. A-RLC is a marriage of traditional feedback control and Artifcial Intelligence intended to address two of the three essential functionalities for a morphing vehicle: how to reconfigure, and learning to reconfigure. The third is knowing when to reconfigure. A-RLC uses Structured Adaptive Model Inversion (SAMI) as the controller for tracking trajectories and handling time-varying properties, parametric uncertainties, un-modeled dynamics, and disturbances. Reinforcement Learning with a Q-Learning algorithm is used to learn how to produce the optimal shape at every flight condition over the life of the aircraft. Important aspects of nonlinear, massively distributed actuation and sensing systems are control effector saturation and stability. We are developing a rigorous theoretical framework that addresses these aspects. The A-RLC methodology will be demonstrated with a numerical simultation example of 3-D delta wing unmanned air vehicle that can morph in all three spatial dimensions, over a set of optimal shapes corresponding to specified flight conditions, while tracking a specified trajectory in the presence of disturbances.