



Air Force Research Laboratory through sub-contract with Barron Associates
1 September 2017 – 30 April 2018
Total award $49,982
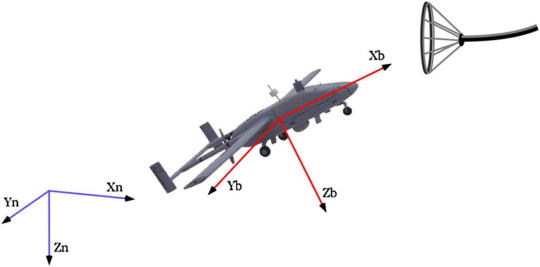
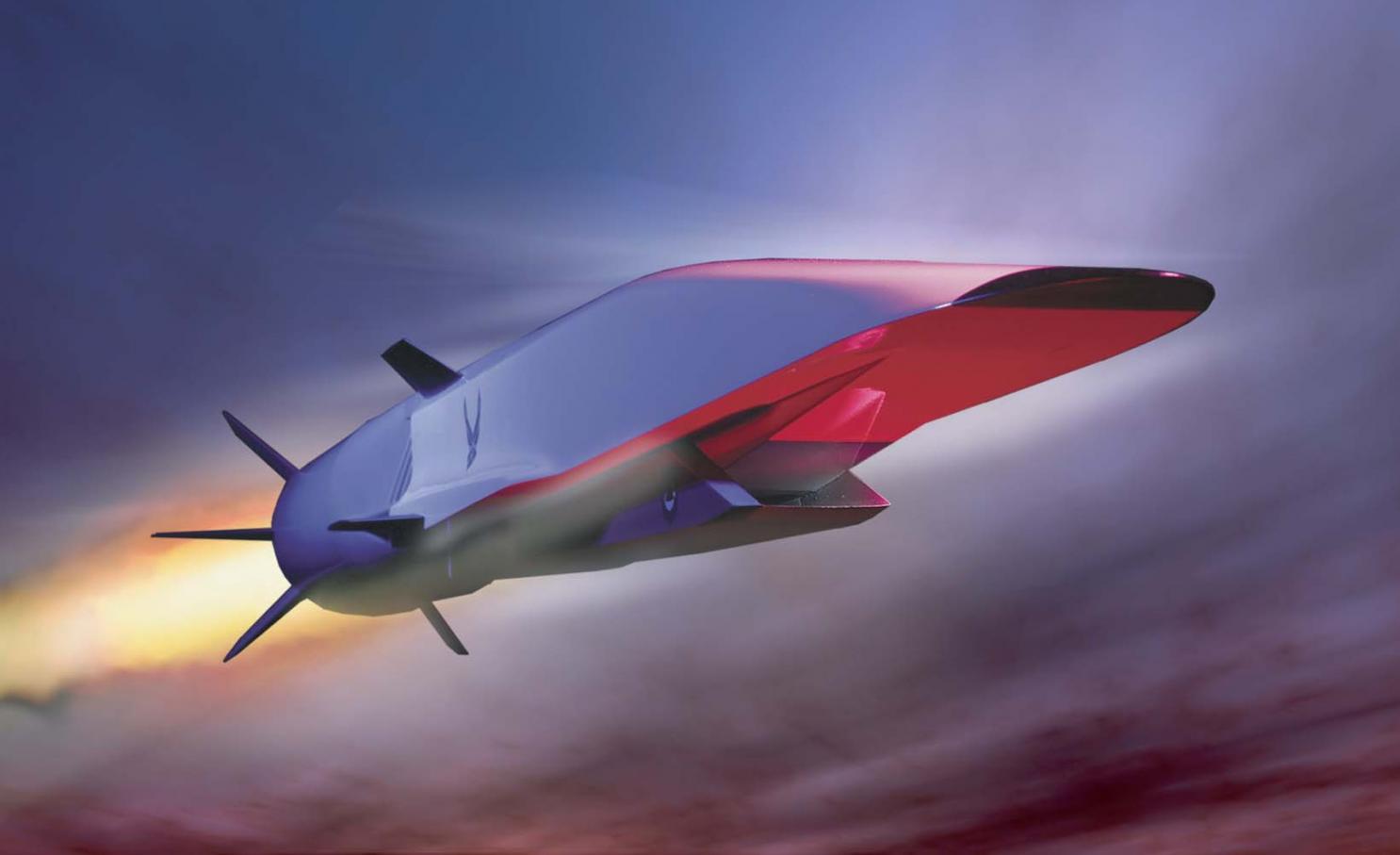
Unmanned Aircraft System (UAS) platforms provide many important military roles that require long periods of time aloft. Repeated returns to base for refueling is one scenario that can severely degrade mission operations. There is a critical need to develop autonomous aerial refueling (AAR) capabilities in which both the tanker and receiver aircraft are unmanned. One of the challenges in AAR is minimum airspeed. For this effort the focus will be Groups 4 and 5 UASs with maximum airspeeds of 130 KCAS. The main objective is to radically increase mission length and on-station availability of UAS platforms by developing the capability to reliably conduct (AAR) of Groups 4 and 5 UASs with calibrated airspeeds of 130 KCAS or less.
Additional key technical challenges associated with AAR of UAS are:
- The refueling procedure will require the UAS to operate in close proximity of the tanker aircraft. Relative location must be known with a high level of accuracy, employing collision avoidance procedures.
- One or both the tanker and UAS must respond quickly if an unsafe refueling condition occurs.
- AAR solutions should minimize modifications to both the tanker and the UAS due to cost, maintenance and SWaP considerations.
- The refueling system must operate under broad weather and day and night conditions.
Working with me on this project are:
Graduate Students:
-Zeke Bowden, MENG AERO